

DINERBOT T10
インタラクション性を大幅に向上させます
走行、接触、配膳などの状態に応じて、ヘッドの動作フィードバックを提供します。
顧客エンゲージメントを向上
動ける頭部、23.8″ サイネージ、インタラクティブなタッチボタンがエンゲージメントを再定義します。
手軽に受け取り確認、細部まで配慮されたデザイン
a.タッチ操作 b.AIトレー検出
安全性を向上
360°環境認識、4つの立体ビジョンセンサー + VSLAM +1 つの RGBカメラを搭載し、超広角でクリアビジョンを実現します
気楽に捉え、気軽にする
自動受取のためのオープントレー、検知ビジョン、通知ライト、画面上のガイダンス、音声案内が付きます
お好きな組み合わせで楽しもう!
カスタマイズできます:ヘッドアクセサリー、表情、音声、大型サイネージ
KEENONのコア技術
精確なナビゲーションと位置合わせ
環境データをより効率的に収集し、より正確なデータマップを形成し、より正確な位置決めを行います。
自社開発のアルゴリズムとマルチロボットコラボレーション
自社開発の AI アルゴリズムにより、ロボットは自動的に多様な環境で効率化するためのリアルタイムの経路計画と障害物回避が可能になります。
3つの特許取得済みのシャーシ設計
CAEに基づく同軸リンケージサスペンションのシミュレーションです。
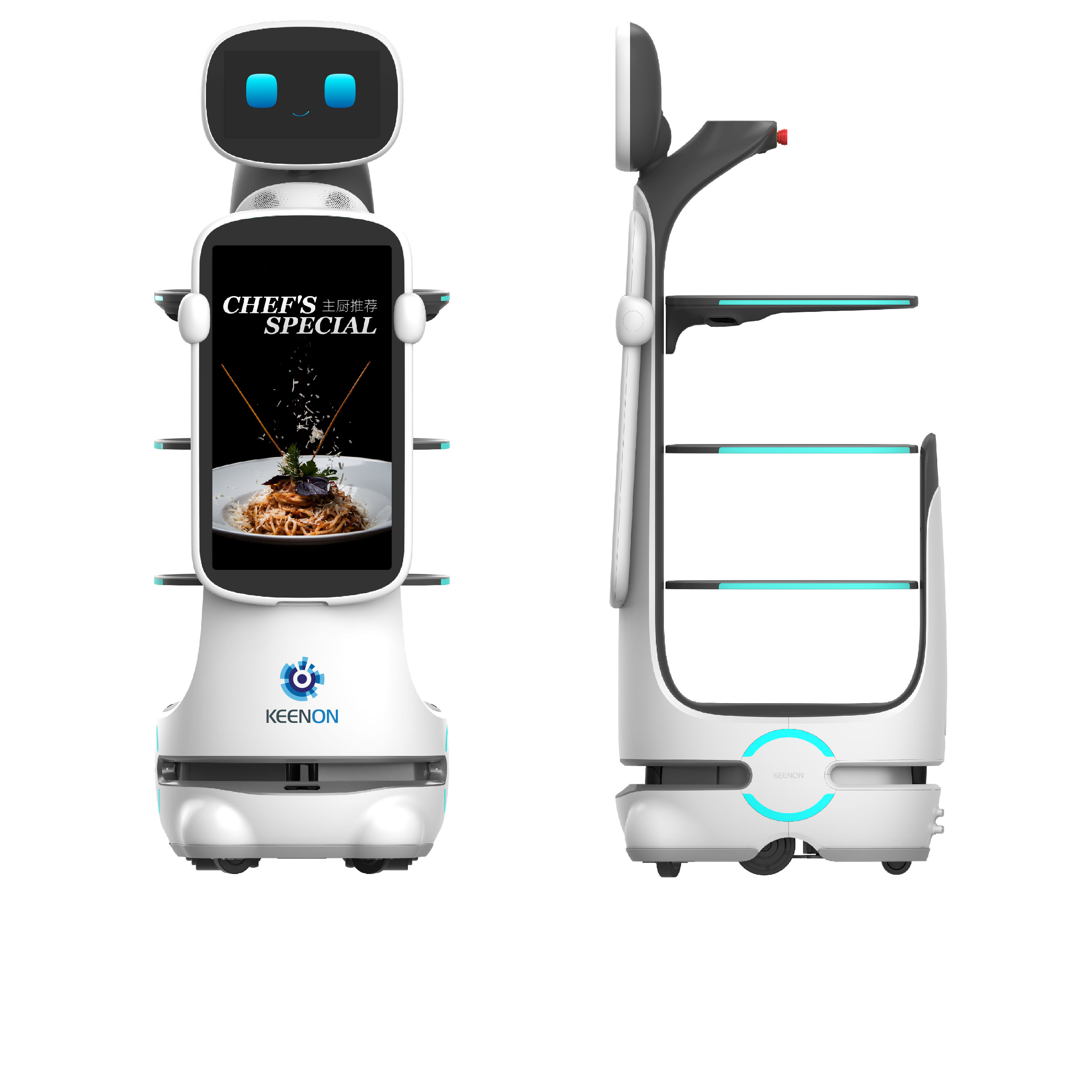
- 本体寸法(WxDxH)
- 48.6 x 55.5 x 139.9 cm
- (19.13″ x 21.85″ x 54.69″)
- 最高走行速度
- 1 m/s (3.28 ft/s)
- 充電時間**
- 5.5 時間
- 最大搭載重量
- 40 kg (88 lbs)
- 本体重量
- 58 kg (128 lbs)
- 稼働時間*
- 最大 12.5 時間
- 最大傾斜角度
- 5°
- 最小通過幅
- 59 cm (23.23″)
* バッテリーの持続時間は様々な要因に依存し、実際の結果は異なる場合があります。バッテリーの寿命と充電サイクルは使用と設定によって異なります。
** 上記の充電時間は、充電器または充電パイルを使用してロボットの電源を入れた状態で、バッテリーを 15% から 100% まで充電するために必要な時間を指します。濡れたロボットを充電しないでください。



